13537825155





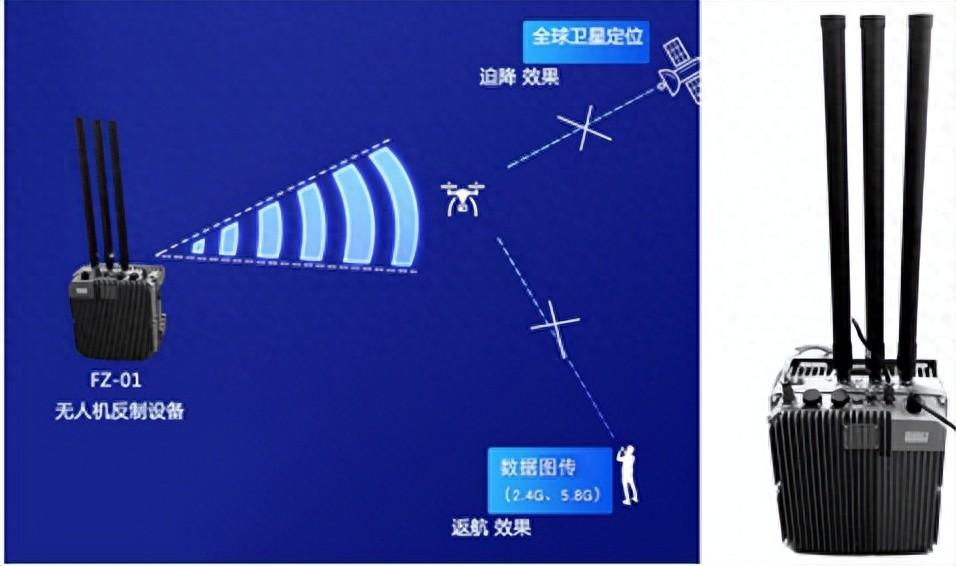
如何达到阻断链路计算反无人机打击系统的有效范围?
计算/测量的的有效干扰的范围
在了解了干扰的基础知识后,我们将尝试了解干扰的范围是如何计算的。应该为此使用以下“二维三角形”:

假设阻拦天线的高度以及操作员遥控器的高度与无人机高度(典型飞行高度10-20米)相比相对较小。现在也应该提到阻塞天线安装得越高-干扰的范围越大;同样,操作员获得遥控器越高,通讯范围越大(因此干扰范围越小)。
现在是另一个重要澄清的时候了。一般来说,在无人机应用中,其目的是在距离敏感区域/周边(安装阻挡器的地方)数百米内锁定无人机。例如,我们想拦截距离干扰机300米并在10米高处飞行的无人机。可以看出,在这种情况下,阻挡器和无人机之间的对角线距离近似等于它们之间的水平距离。因此,为了简化事情,我们将讨论水平距离,并且不会因准确的距离计算而烦恼,因为差异非常小。
现在,让我们编写描述到达接收器输入端的信号功率电平的数学表达式,忽略电缆损耗。
接收器输入端的操作员信号
Ro=Po+Go-Plo+Gdo
其中:
Ro=无人驾驶接收机输入端操作员遥控器的信号电平;
Po=操作员遥控器的输出功率;
Go=操作员遥控器的天线增益;
Plo=在操作员的遥控信号上造成的传播损失。“无人机<->操作员距离”用于计算此损失,以及无人机高度和遥控天线高度;
Gdo=无人机接收机的天线增益,当向操作员方向“看”时;
重要提示:Ro必须大于无人机接收机的灵敏度,否则操作员与您的无人机之间不会建立通信链路(因此不需要阻挡器)。
接收器输入端的干扰信号
Rj=Pj+Gj-Plj+Gdj
其中:
Rj=无人机接收器输入端的干扰信号电平;
Pj=在所使用的特定频率/通道处的干扰器的输出功率;
Gj=在所使用的特定频率/信道下的干扰天线的增益;
Plj=干扰信号上的传播损失。距离“干扰器<->Drone”用于计算此损耗,以及无人机的高度和干扰器天线的高度;
Gdj=无人机接收机的天线增益,当向着干扰机“看”时。
然后需要比较Ro和Rj。如前所述,为了简单起见,我们将假设它们足以比较它们,而强烈的信号总是“胜利”。我们将:
Pj+Gj-Plj+Gdj(<=>)Po+Go-Plo+Gdo
该等式尽管以其简单的形式(没有电缆损耗,SNR等)可用于计算EACH块场景。可以看出,它由两个维度/链接(Blocker<->Drone和Operator<->Drone)组成,而不仅仅是通信链接的维度/链接。
换句话说,对于无人机链路的每个特定条件(特定输出功率,天线的增益和高度,距离等),存在无人机链路的特定场景/条件,它。这就是为什么我们回答“反无人机打击系统的有效范围?”的问题。从来不是一件容易的事。有很多可能的答案!





 公司信息
公司信息  底部导航
底部导航 