13537825155





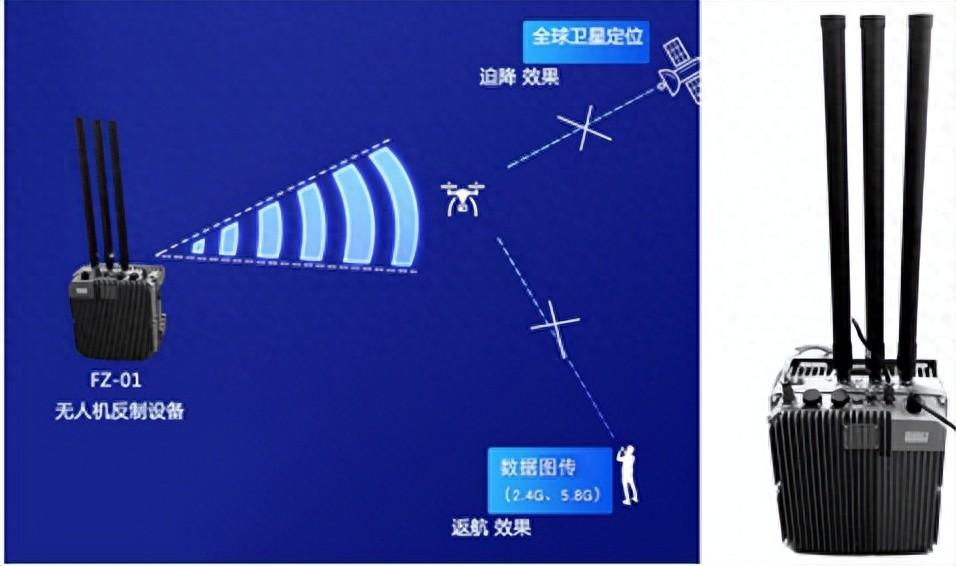
反无人机严厉打击系统软件的合理范畴多少钱?
怎样做到阻隔链路测算反无人机严厉打击系统软件的合理范畴?
当向潜在用户展现您的反无人机系统软件是时,个难题一直同样的:“严厉打击的范畴是啥?”
悲剧的是,大部分顾客都了解链路和通讯设备,但对影响和机器设备自身的定义不太熟。因而,她们搞不懂为何这个问题沒有“简易”或单一的回答。
文中的目地是表述怎样保持“连接”块的测算和/或量度。很显著,干扰器并沒有连接到受害人,但我们可以像人们观查2个“合作方”中间的一切正常沟通交流连接一样剖析他们中间的相互作用力。
一般来说,人们可以说通讯链路只有一个必须测算的层面(TX->RX),针对堵塞状况,必须测算2个层面(TX->RX和干扰器->RX)随后开展较为。将在接收机键入端展现更强数据信号的“链路”将占主导性;它能够 是智能变送器(“合作方”)或阻滞剂。
以便尽快表述这个问题,人们将最先试着表述通讯堵塞的基本要素。
阻拦定义
干扰器的功效是终断2个(或大量)合作方中间的通讯链路(或互联网);当她们尝试相互沟通交流或在她们中间传送一些数据信息时,即便在无人机两者之间操作员中间产生通讯连接也是一个特殊情况,与别的很多人不一样。我们可以试着阻拦手机上和通信基站中间,2个防守战术录音机中间,泵和用以激话它的控制器中间的通讯等。
以便阻拦,干扰器以与敌人的链路或互联网同样的頻率发送频射动能(CW+调配)。敌人接收机(“接听”方)将接受阻拦者传送和“小伙伴”传送。更强劲的信念掌握主动;假如阻断器的输出功率超过小伙伴的输出功率,观众将没法正确认识信息/数据信息。或是,假如“合作方”的权利超过阻拦者的权利,则观众将会可以正确认识信息/数据信息,而且小伙伴中间的通讯连接应当再次连续。
这一表述有点儿浅薄,致力于简单化事儿。可是,如果我们尝试深入分析这个问题,能够 插进大量主要参数来较为2个链路的数据信号电平。一个事例是信号接收器在其键入中“见到”的SNR(数据信号噪音比)。有时候抵达接收机键入端电磁干扰将会会低于通讯数据信号(“小伙伴”)并依然掌握主动。产生这类状况的缘故一般 是信号接收器在键入端2个数据信号中间必须一定的容量,便于可以表述在其中的一个(一般 是强的一个)。可是,在优秀的通讯系统中,
以便简易考虑,我们在探讨中不考虑到SNR,而且人们将再次假定接收机键入端强数据信号一直“获胜”。
测算/精确测量的的合理影响的范畴
在了解了影响的基本知识后,人们将试着掌握影响的范畴是如何计算的。
假定阻止天线的高度及其操作员控制器的高度与无人机高度(典型性航行高度10-20米)对比相对性较小。如今也应当提及堵塞天线安裝得越高-影响的范畴越大;一样,操作员得到控制器越高,通信范畴越大(因而影响范畴越小)。
现在是另一个关键回应的情况下了。一般来说,在无人机运用中,其目地是在间距敏感区/附近(安裝阻拦器的地区)数百米内锁住无人机。比如,人们想阻拦间距干扰机300米并在10米高空航行的无人机。能够 看得出,在这类状况下,阻拦器和无人机中间的直线间距类似相当于他们中间的水平距离。因而,以便简单化事儿,人们将探讨水平距离,而且不容易因精确的间距测算而苦恼,由于差别十分小。
如今,我们一起撰写叙述抵达信号接收器键入端数据信号输出功率电平的数学课关系式,忽视电缆线耗损。
信号接收器键入端操作员数据信号
Ro=Po+Go-Plo+Gdo
在其中:
Ro=自动驾驶接收机键入端操作员控制器的数据信号电平;
Po=操作员控制器的功率;
Go=操作员控制器的天线增益值;
Plo=在操作员的遥控器数据信号上导致的散播损害。“无人机<->操作员间距”用以测算此损害,及其无人机高度和遥控器天线高度;
Gdo=无人机接收机的天线增益值,当向操作员方位“看”时;
重要提示:Ro务必超过无人机接收机的敏感度,不然操作员与您的无人机中间不容易创建通讯链路(因而不用阻拦器)。
信号接收器键入端电磁干扰
Rj=Pj+Gj-Plj+Gdj
在其中:
Rj=无人机信号接收器键入端电磁干扰电平;
Pj=在所应用的特殊頻率/安全通道处的干扰器的功率;
Gj=在所应用的特殊頻率/无线信道下的影响天线的增益值;
Plj=电磁干扰上的散播损害。间距“干扰器<->Drone”用以测算此耗损,及其无人机的高度和干扰器天线的高度;
Gdj=无人机接收机的天线增益值,当朝着干扰机“看”时。
随后必须较为Ro和Rj。如前所述,以便简易考虑,人们将假定他们得以较为他们,而明显的数据信号一直“获胜”。人们将:
Pj+Gj-Plj+Gdj(<=>)Po+Go-Plo+Gdo
该等式虽然以其简易的方式(沒有电缆线耗损,SNR等)可用以测算EACH块情景。能够 看得出,它由2个层面/连接(Blocker<->Drone和Operator<->Drone)构成,而不仅是通讯连接的层面/连接。
换句话,针对无人机链路的每一特殊条件(特殊功率,天线的增益值和高度,间距等),存有无人机链路的特殊情景/标准,它。这就是为何人们回应“反无人机严厉打击系统软件的合理范畴?”的难题。从不是一件非常容易的事。有很多将会的回答!
我们一起尝试尽快了解这一艰难。乍一看,这一方程组好像不太繁杂。可是,当“深层次发掘”每一主要参数的关键点时,迅速马上会发觉一个比较复杂的场景:
答:假如干扰器的功率并不一定安全通道的固定值,则针对干扰器准备进攻的每一频段,Pj具备不一样的值;Po的状况也是这般,由于人们常常碰到不一样的Drone实体模型(和控制器),他们具备彻底不一样的特点;
B.假如干扰器天线的增益值并不一定安全通道的固定值,则针对干扰器准备进攻的每一频段Gj常有不一样的值;Go也是这般,由于人们常常碰到不一样的Drone实体模型(和控制器),他们具备彻底不一样的特点;
C.假定无人机处在运动状态,那麼Gdj和Gdo的值将会会持续转变;
D.后,动态性和持续转变的主要参数是在2个数据信号(Plj和Plo)上导致的Pathloss(散播损害)。无人机运作后,“干扰器<->Drone”间距和“操作员无人机”间距会持续转变;一般来说,当她们中的一个越来越大,另一个愈来愈小。更不尽人意的是,大量的主要参数,比如干扰器天线高度和遥控器天线,及其无人机的高度也正在进入该测算。
如今我们知道所述方程组中出現的全部八(8)个主要参数能够 有挺大的转变,因而应当十分清晰,由于影响范畴的界定并不这么简单。回答自始至终是CONDITIONED。比如,假如许多人问人们干扰机是不是能够 在300米的间距阻拦无人机,回答是有时它会是,有时不容易。准确的回答一直在于下列好多个层面:
A.人们尝试进攻的实际Drone实体模型(它将界定所应用的频段,等式两侧的功率和天线增益值);
B.每一元器件的天线高度(无人机天线,操作员天线和影响天线)。
留意:我们可以试着这里界定一个“相同点”,以降低自变量的总数。人们觉得,当无人机在路面处时(高度=0米),务必测算或精确测量影响范畴。干扰器和操作员也应当在路面上(天线高度高1-3米),而不是在山顶或房屋建筑顶端。这是一个非常好的测量法,因为它也仿真模拟了干扰器的坏状况。它是因为Drone天线的多方位个人行为,及其“干扰器<->Drone”间距超过“Operator无人机”这一客观事实。





 公司信息
公司信息  底部导航
底部导航 